FundamentalsThe robots can play as two roles: Attacker or Defender. The robots utilise their Bluetooth connection to work out which robot is the Attacker or Defender and moves accordingly. If one of the robots is taken off the field, the other one will automatically become a defender.
|

|
Utilising the HC-05 Bluetooth module
Each Robot has an HC-05 Bluetooth Module which pair with each other. The robots can send their role (Attacker or Defender), the ball direction and the ball strength (distance) using a Serial protocol. The robots can decide whether it should be an attacker or a defender and switch positions accordingly, just like real soccer players. This strategy is implemented in Gameplay and helps reduce the number of Double Defence fouls.
|
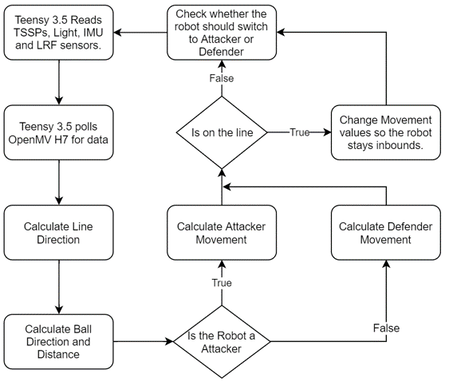
How our robots workAt the beginning of the code loop the robot reads all of the on-board sensors and receives the other robot's Bluetooth data. It then uses the data from these sensors to calculate the optimal movement direction through a series of algorithms. The diagram on the right shows the logical process of the robot, and how it uses its sensor data.
|
Light and lrf (laser range finder) sensor fusion
|
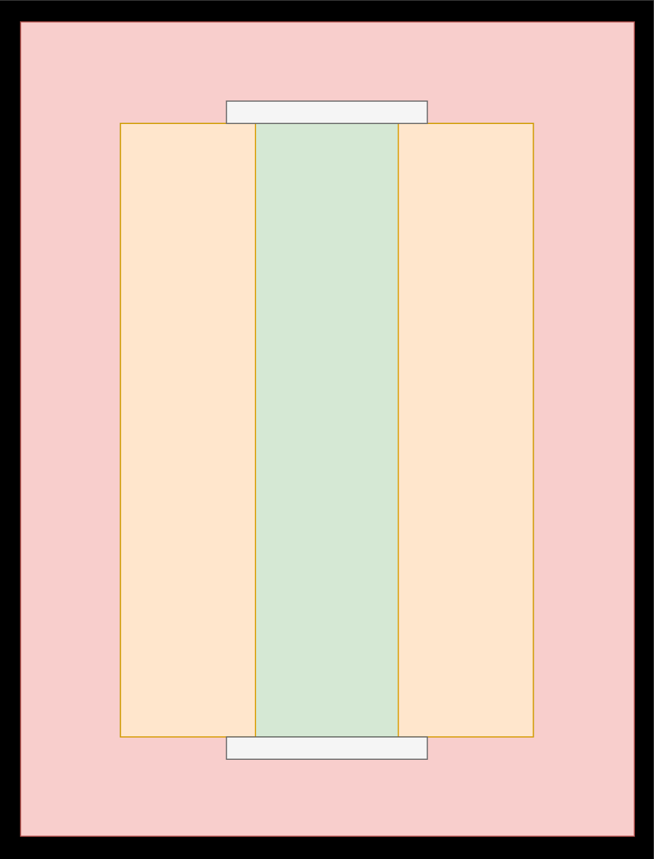
LRF’s on top of the cone provide the robot with its distance to the wall in millimeters. These distances are used in collaboration with the Light Sensors to help the robot stay in bounds. This happens by dividing the field into three strips, a centre strip where the robot runs at full speed and two strips either side where the robot runs at a reduced speed in order to avoid the line. This reduces the chance of the robot going out.
On-board LRF's allow our robot to track the goal even in super-team scenarios when we may not be able to see the goal at long distances. This means that we can track the goal roughly to a point where the camera will be able to see it more accurately. |
|
