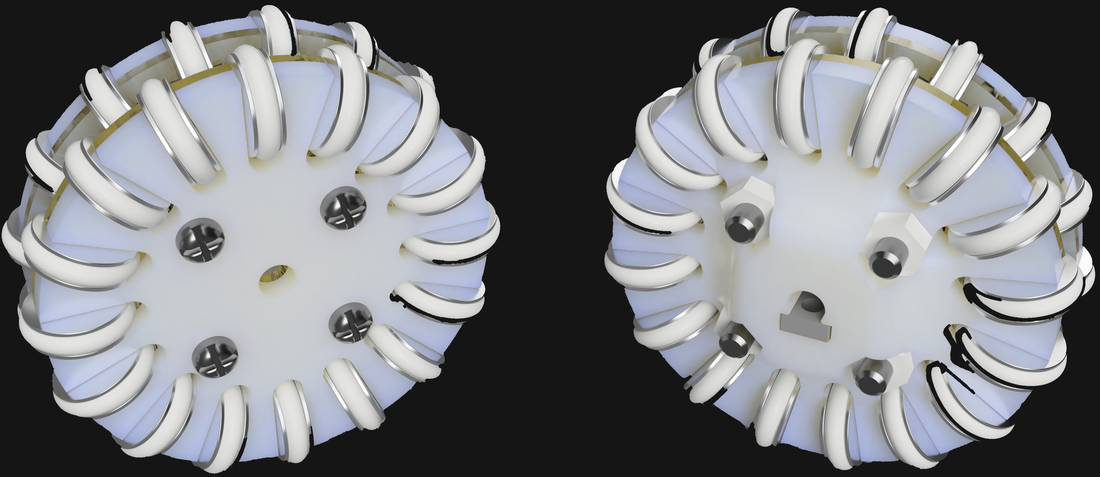
Double Layer omni-wheelThrough multiple stages of research and development, we have developed wheels that are far more superior for game-play than other wheels such as the pre-made GTF wheel. We began by creating a single layered omni-wheel, and when this didn't provide enough grip, layered two of them together to create a double layer wheel. This effectively doubles our grip and stability.
|
|
360 degree computer visionLast year, our robot used a custom made mirror in the shape of a V, to essentially create two separate fields of view for the camera that would look vertically at it. This reduced our field of view a lot however, so instead we developed a suitable method of producing very accurate cone shaped mirrors to create a 360 degree camera. This mirror was produced using a vacuum forming process to enhance its quality over other methods such as cutting the net of a cone and gluing it over a form. The slideshow to the right (below for mobile) contains rendered simulations of what our cone would see in game.
|
|
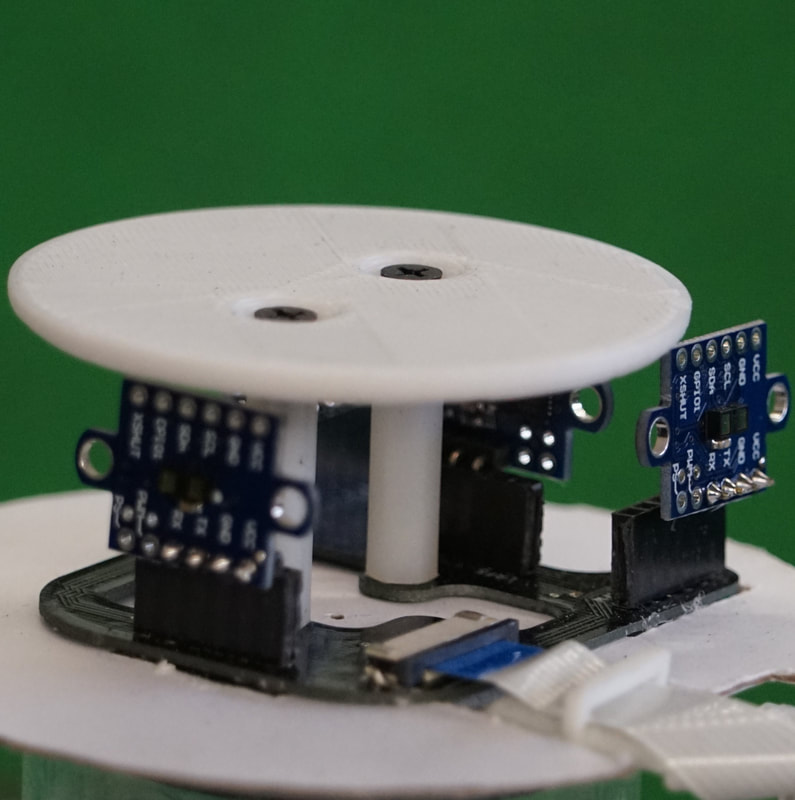
Co-ordinates with laser range findersLaser range finders are a sensor that emits a pulse of light, then times how long it takes to reach the sensor again. The sensor then uses this time, along with the known speed of light, to calculate the distance to an object very accurately. These are used to provide our teensy 3.5 micro controller with the accurate co-ordinate of the robot. This helps us out avoid and track the goals in super-team where we may not necessarily have the camera range to see them.
|
|
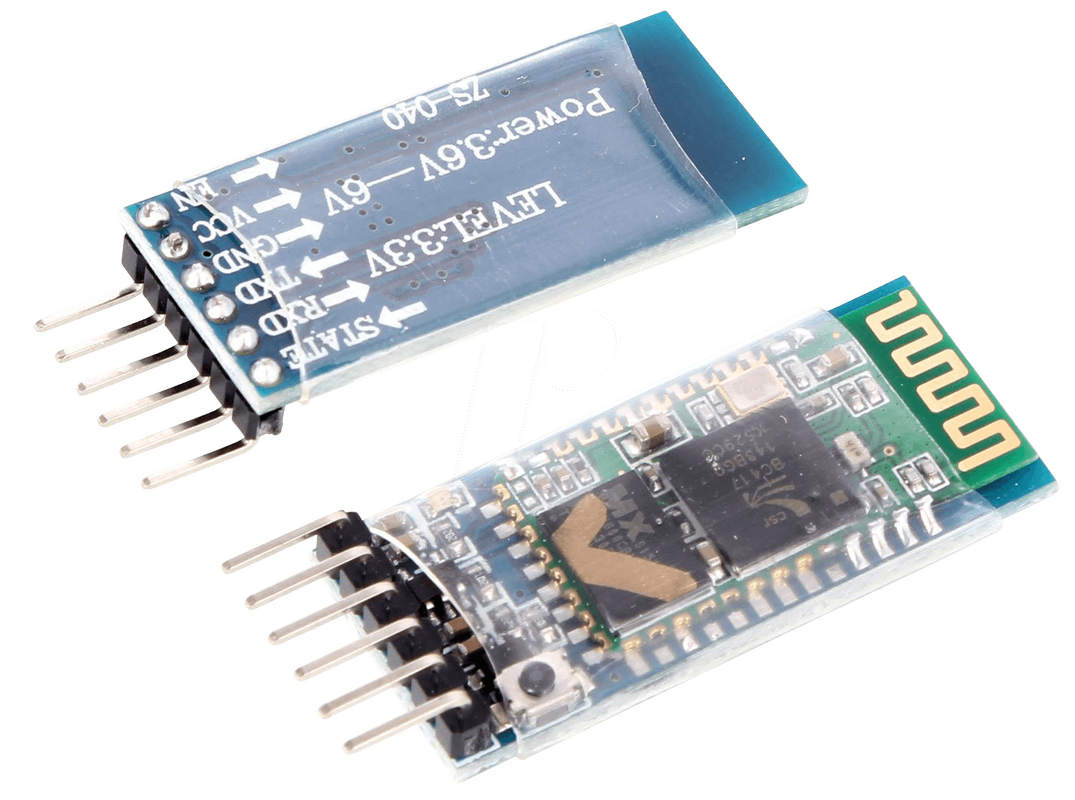
Bluetooth communication and dynamic switchingThrough previous years of developing strategies which utilise blue-tooth to communicate data between robots, we have development multiple strategies to better play a game of soccer. Our robots can switch between two roles, attacker and goalie. They do this dynamically based on variables such as distance to the ball, current role and angle of the ball.
|
|
