Programming languages usedOur robots utilise the programming languages Python and C++. Our teensy 3.5 runs on the arduino framework which runs best with C++ programming. Our Open-MV runs a python script to do calculations on camera data.
|
|
|
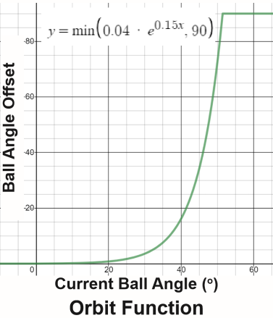
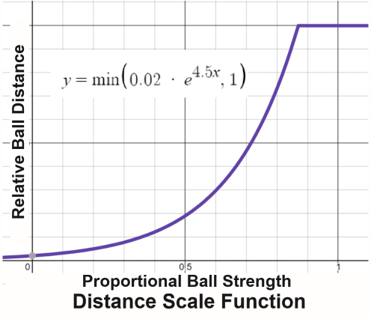
Ball following with exponential functionsOur robots use a method called orbiting to first position itself behind the ball. The orbit function includes two exponential functions that intuitively calculate the attacker movement value. The first function calculates the ball angle offset based on the current ball angle according to the robot. The second function calculates the relative ball distance based on the TSSP proportional ball strength.
|
|
